Stick Slip
In this example we simulate a mechanical system that exhibits stick-slip behaviour, typical for coulomb friction. Lets consider the setup below, where we have a box sitting on a driven conveyor belt. The box is also coupled to a fixation by a spring-damper element.
You can also find this example as a single file in the GitHub repository.
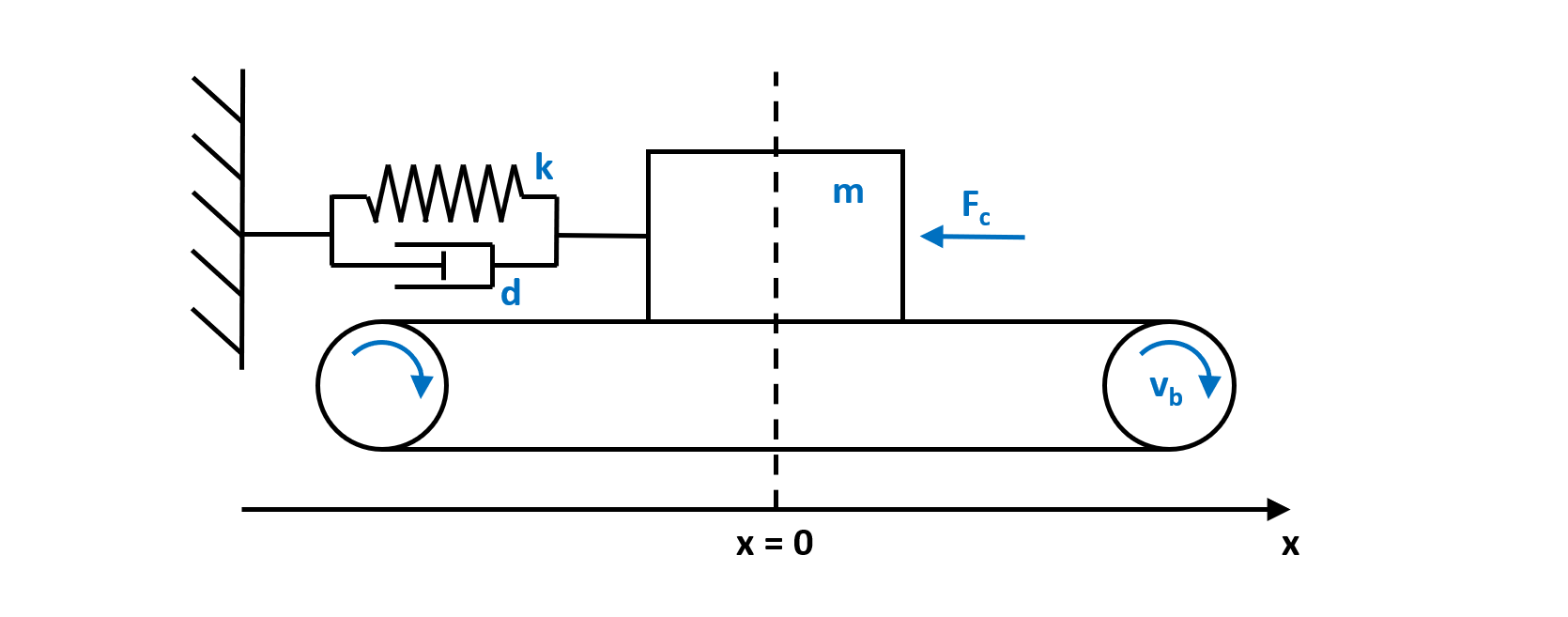
This system has two possible states:
The slip state where the box oscillates freely. Here we have the dynamical behaviour of a classical damped harmonic oscillator, a 2nd order ODE.
The stick state where box exactly follows the belt. Here the box velocity is clamped to the belt velocity (algebraic constraint) and the system dynamics is reduced to a pure 1st order integration.
The two states transition from one to another depending on the relative velocity of the box to the belt and the force acting on the box. If the relative velocity is zero and the force is below some threshold, the system enters the stick state. When the force exceeds a certain threshold, the box breaks free and enters the slip state.
The resulting switched system is shown in the block diagram below:
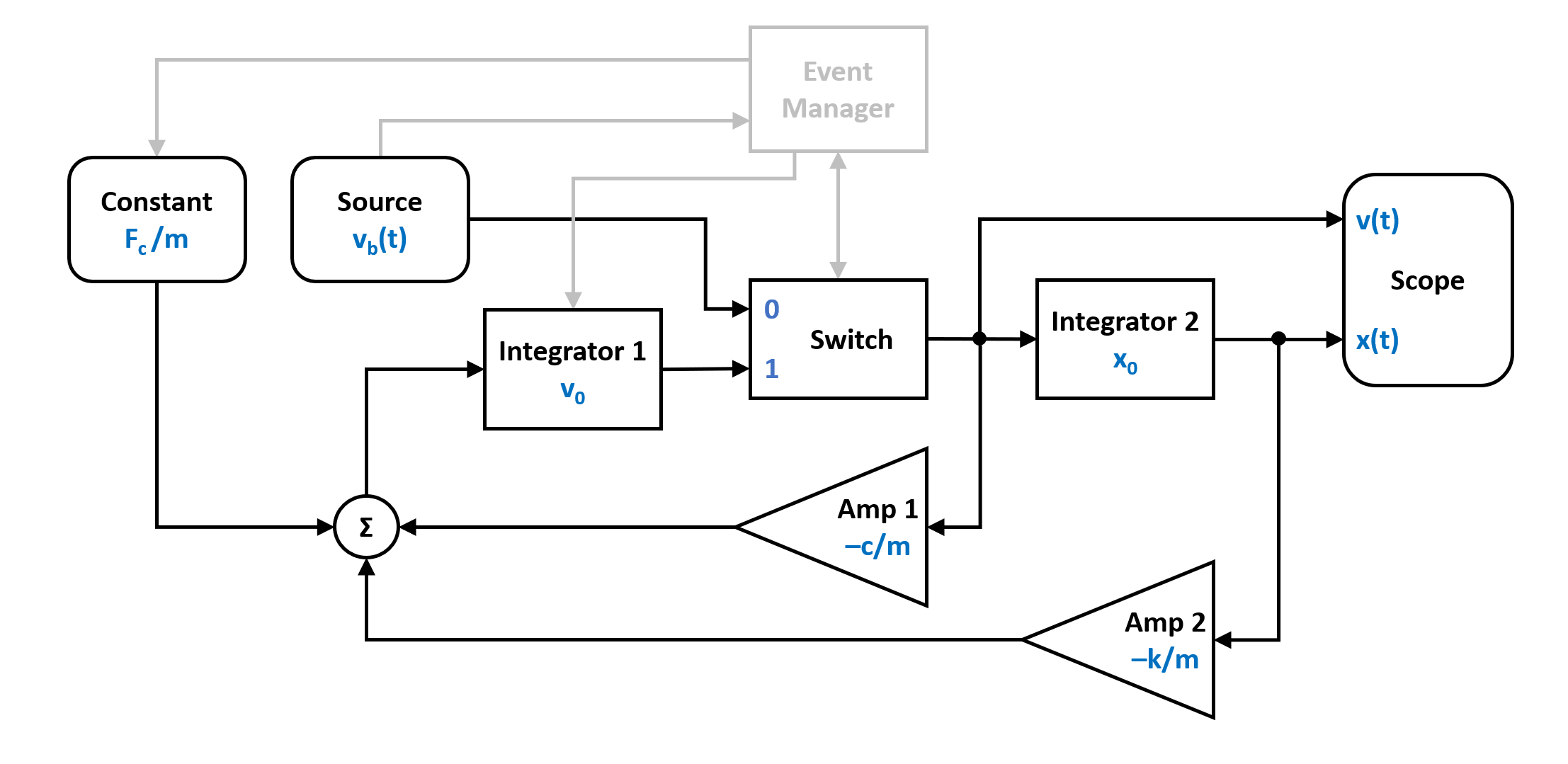
Note that the event manager that tracks the system state and sets the switch to select the input of the position integrator.