Bouncing Pendulum¶
This example demonstrates a hybrid system combining continuous pendulum dynamics with discrete bounce events. The pendulum swings until it hits the ground (zero angle), at which point it bounces back with reduced energy.
You can also find this example as a single file in the GitHub repository.
This example showcases:
Nonlinear pendulum dynamics with
ZeroCrossingevent detectionState transformations at discrete events (angular velocity reversal)
Automatic differentiation through hybrid systems with the
ValueclassSensitivity analysis of the bounce elasticity parameter
First let’s import the Simulation and Connection classes along with the required blocks and event manager:
[1]:
import numpy as np
import matplotlib.pyplot as plt
# Apply PathSim docs matplotlib style
plt.style.use('../pathsim_docs.mplstyle')
from pathsim import Simulation, Connection
from pathsim.blocks import Integrator, Amplifier, Function, Adder, Scope
from pathsim.solvers import RKCK54
from pathsim.events import ZeroCrossing
from pathsim.optim import Value
---------------------------------------------------------------------------
ImportError Traceback (most recent call last)
Cell In[1], line 11
9 from pathsim.solvers import RKCK54
10 from pathsim.events import ZeroCrossing
---> 11 from pathsim.optim import Value
ImportError: cannot import name 'Value' from 'pathsim.optim' (/home/docs/checkouts/readthedocs.org/user_builds/pathsim/envs/v0.12.4/lib/python3.13/site-packages/pathsim/optim/__init__.py)
System Dynamics¶
The mathematical pendulum is governed by the nonlinear differential equation:
where:
\(\phi\) is the angle from vertical
\(g\) is gravitational acceleration
\(l\) is the pendulum length
The bounce event occurs when \(\phi = 0\) (pendulum hits the ground), at which point the angular velocity reverses with a loss factor.
[2]:
# Initial angle and angular velocity
phi0, omega0 = 0.99*np.pi, 0.0
# Parameters (gravity, length)
g, l = 9.81, 1
# Bounceback coefficient (for sensitivity analysis)
b = Value(0.9)
---------------------------------------------------------------------------
NameError Traceback (most recent call last)
Cell In[2], line 8
5 g, l = 9.81, 1
7 # Bounceback coefficient (for sensitivity analysis)
----> 8 b = Value(0.9)
NameError: name 'Value' is not defined
Note that we wrap the bounceback coefficient b in a Value instance to enable automatic differentiation. This allows us to compute sensitivities of the system response with respect to this parameter.
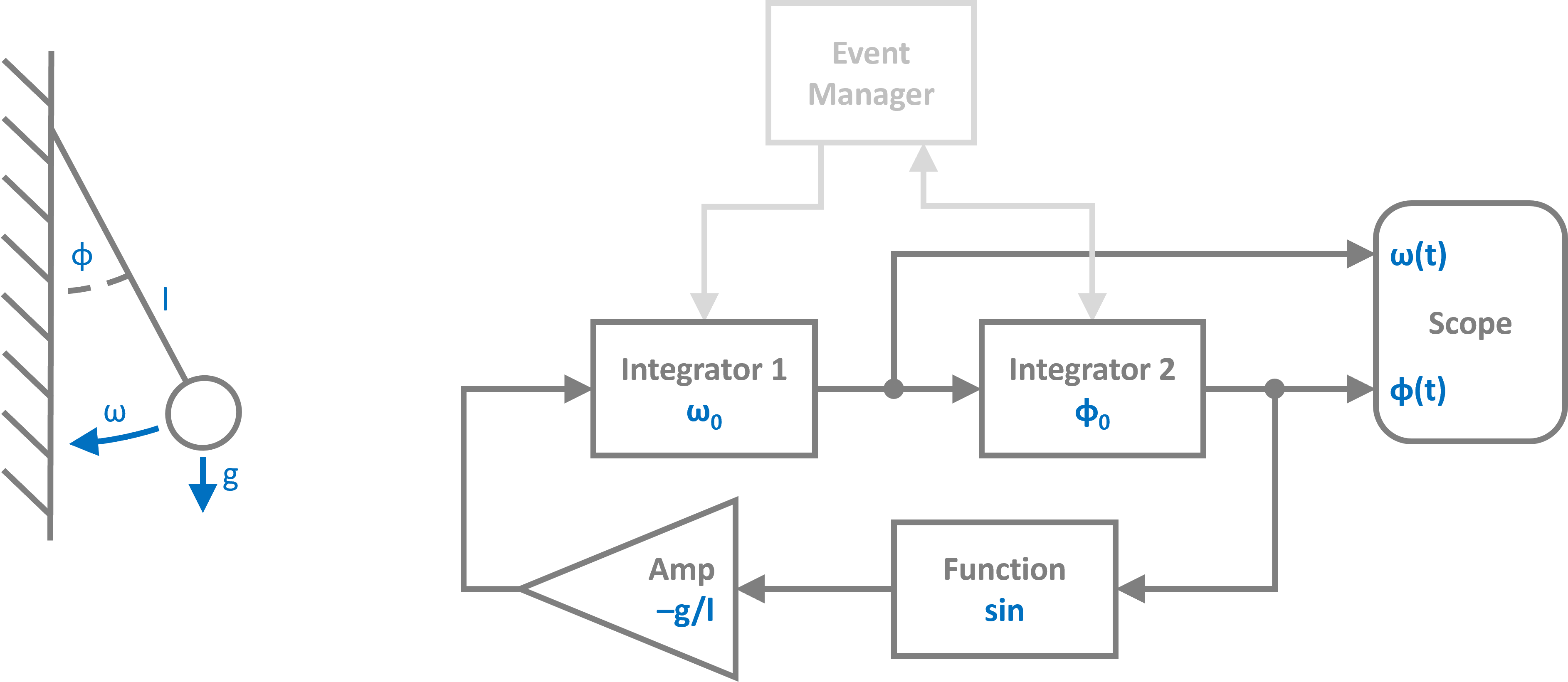
Block Diagram Construction¶
We construct the system from basic blocks:
[3]:
# Blocks that define the system
In1 = Integrator(omega0) # angular acceleration -> angular velocity
In2 = Integrator(phi0) # angular velocity -> angle
Amp = Amplifier(-g/l) # gravity term
Fnc = Function(np.sin) # nonlinearity
Sco = Scope(labels=[r"$\omega$", r"$\phi$"])
blocks = [In1, In2, Amp, Fnc, Sco]
# Connections between the blocks
connections = [
Connection(In1, In2, Sco[0]),
Connection(In2, Fnc, Sco[1]),
Connection(Fnc, Amp),
Connection(Amp, In1)
]
Event Detection and Action¶
We define a ZeroCrossing event to detect when the pendulum hits the ground ($phi = 0$). The event function monitors the angle, and the action function reverses the angular velocity with an energy loss factor.
[4]:
# Event function for zero crossing detection
def func_evt(t):
*_, ph = In2()
return ph
# Action function for state transformation
def func_act(t):
*_, om = In1()
*_, ph = In2()
In1.engine.set(-om*b) # reverse velocity with energy loss
In2.engine.set(abs(ph)) # ensure angle stays positive
# Events (zero crossing)
E1 = ZeroCrossing(
func_evt=func_evt,
func_act=func_act,
tolerance=1e-6
)
events = [E1]
The engine.set() method allows direct manipulation of block states during event actions. This is crucial for implementing the discontinuous velocity change at the bounce.
We initialize the simulation with the RKCK54 solver for accurate integration of the nonlinear dynamics:
[5]:
# Simulation instance from the blocks and connections
Sim = Simulation(
blocks,
connections,
events,
dt=0.1,
log=True,
Solver=RKCK54,
tolerance_lte_abs=1e-8,
tolerance_lte_rel=1e-6
)
10:57:29 - INFO - LOGGING (log: True)
10:57:29 - INFO - BLOCKS (total: 5, dynamic: 2, static: 3, eventful: 0)
10:57:29 - INFO - GRAPH (nodes: 5, edges: 6, alg. depth: 3, loop depth: 0, runtime: 0.070ms)
Now let’s run the simulation:
[6]:
Sim.run(duration=15)
10:57:29 - INFO - STARTING -> TRANSIENT (Duration: 15.00s)
10:57:29 - INFO - -------------------- 1% | 0.0s<0.2s | 1358.8 it/s
10:57:29 - INFO - FINISHED -> TRANSIENT (total steps: 26, successful: 19, runtime: 25.15 ms)
---------------------------------------------------------------------------
NameError Traceback (most recent call last)
Cell In[6], line 1
----> 1 Sim.run(duration=15)
File ~/checkouts/readthedocs.org/user_builds/pathsim/envs/v0.12.4/lib/python3.13/site-packages/pathsim/simulation.py:1754, in Simulation.run(self, duration, reset, adaptive)
1751 break
1753 #advance the simulation by one (effective) timestep '_dt'
-> 1754 success, error_norm, scale, *_ = self.timestep(
1755 dt=_dt,
1756 adaptive=_adaptive
1757 )
1759 #perform adaptive rescale
1760 if _adaptive:
1761
1762 #if no error estimate and rescale -> back to default timestep
File ~/checkouts/readthedocs.org/user_builds/pathsim/envs/v0.12.4/lib/python3.13/site-packages/pathsim/simulation.py:1646, in Simulation.timestep(self, dt, adaptive)
1644 if adaptive and self.engine.is_adaptive:
1645 if self.engine.is_explicit:
-> 1646 return self.timestep_adaptive_explicit(dt)
1647 else:
1648 return self.timestep_adaptive_implicit(dt)
File ~/checkouts/readthedocs.org/user_builds/pathsim/envs/v0.12.4/lib/python3.13/site-packages/pathsim/simulation.py:1489, in Simulation.timestep_adaptive_explicit(self, dt)
1485 for event, close, ratio in self._detected_events(time_dt):
1486
1487 #close enough to event (ratio approx 1.0) -> resolve it
1488 if close:
-> 1489 event.resolve(time_dt)
1491 #after resolve, evaluate system equation again -> propagate event
1492 self._update(time_dt)
File ~/checkouts/readthedocs.org/user_builds/pathsim/envs/v0.12.4/lib/python3.13/site-packages/pathsim/events/_event.py:209, in Event.resolve(self, t)
207 #action function for event resolution
208 if self.func_act is not None:
--> 209 self.func_act(t)
Cell In[4], line 10, in func_act(t)
8 *_, om = In1()
9 *_, ph = In2()
---> 10 In1.engine.set(-om*b) # reverse velocity with energy loss
11 In2.engine.set(abs(ph))
NameError: name 'b' is not defined
Results¶
Let’s plot the angular velocity and angle over time, marking the bounce events:
[7]:
# Plot the results directly from the scope
fig, ax = Sco.plot(lw=2)
plt.show()

The plot shows:
The angle oscillates between 0 and some maximum value that decreases over time
The angular velocity reverses sign at each bounce (vertical dashed lines)
Energy is progressively lost with each bounce, leading to smaller oscillations
Sensitivity Analysis¶
Since we wrapped the bounceback coefficient in a Value instance, we can extract sensitivities of the system response with respect to this parameter:
[8]:
# Read the recordings from the scope
time, [om, ph] = Sco.read()
# Extract sensitivities
dom_db = Value.der(om, b)
dph_db = Value.der(ph, b)
# Plot sensitivities
fig, ax = plt.subplots(figsize=(8, 4), tight_layout=True, dpi=120)
ax.plot(time, dom_db, lw=2, c="tab:red", label=r"$\partial \omega / \partial b$")
ax.plot(time, dph_db, lw=2, c="tab:blue", label=r"$\partial \phi / \partial b$")
ax.set_xlabel("time [s]")
ax.legend()
ax.grid(True)
plt.show()
---------------------------------------------------------------------------
NameError Traceback (most recent call last)
Cell In[8], line 5
2 time, [om, ph] = Sco.read()
4 # Extract sensitivities
----> 5 dom_db = Value.der(om, b)
6 dph_db = Value.der(ph, b)
8 # Plot sensitivities
NameError: name 'Value' is not defined
These sensitivities show how changes in the bounceback coefficient would affect the angular velocity and angle trajectories. This is particularly useful for:
Understanding parameter influence on hybrid system behavior
Optimization of system parameters
Uncertainty quantification when the bounceback coefficient has measurement uncertainty
PathSim’s automatic differentiation framework propagates gradients through both continuous dynamics and discrete events, making sensitivity analysis of hybrid systems straightforward.