Kalman Filter¶
This example demonstrates the Kalman filter in PathSim for optimal state estimation of a linear dynamical system from noisy measurements. The filter recursively estimates the state of a moving object by combining predictions from a system model with noisy sensor measurements.
You can also find this example as a single file in the GitHub repository.
Import and Setup¶
First let’s import the required classes and blocks:
[1]:
import numpy as np
import matplotlib.pyplot as plt
# Apply PathSim docs matplotlib style
plt.style.use('../pathsim_docs.mplstyle')
from pathsim import Simulation, Connection
from pathsim.blocks import (
Constant,
Integrator,
Adder,
WhiteNoise,
KalmanFilter,
Scope
)
System Parameters¶
We simulate a simple object moving with constant velocity. The true system has a velocity of 2 m/s, but we can only measure its position with noisy sensors. The Kalman filter will estimate both position and velocity from the noisy position measurements.
[2]:
# Simulation parameters
dt = 0.01 # timestep
# True system: object moving with constant velocity
v_true = 2.0 # m/s
x0_true = 0.0 # initial position
# Measurement noise characteristics
measurement_std = 0.6 # standard deviation of position sensor noise
Kalman Filter Configuration¶
The Kalman filter requires several matrices:
F: State transition matrix (how the state evolves)
H: Measurement matrix (what we can observe)
Q: Process noise covariance (model uncertainty)
R: Measurement noise covariance (sensor uncertainty)
x0: Initial state estimate
P0: Initial error covariance
[3]:
# Kalman filter parameters
F = np.array([[1, dt], [0, 1]]) # state transition (constant velocity model)
H = np.array([[1, 0]]) # measurement matrix (measure position only)
# Process noise covariance - models uncertainty in constant velocity assumption
# Derived from continuous-time noise with intensity q = 0.1
q = 0.1 # process noise intensity (m/s^2)^2
Q = np.array([
[dt**3/3, dt**2/2],
[dt**2/2, dt]
]) * q
R = np.array([[measurement_std**2]]) # measurement noise covariance
x0_kf = np.array([0, 0]) # initial estimate [position, velocity]
P0_kf = np.diag([1.0, 1.0]) # initial covariance
System Definition¶
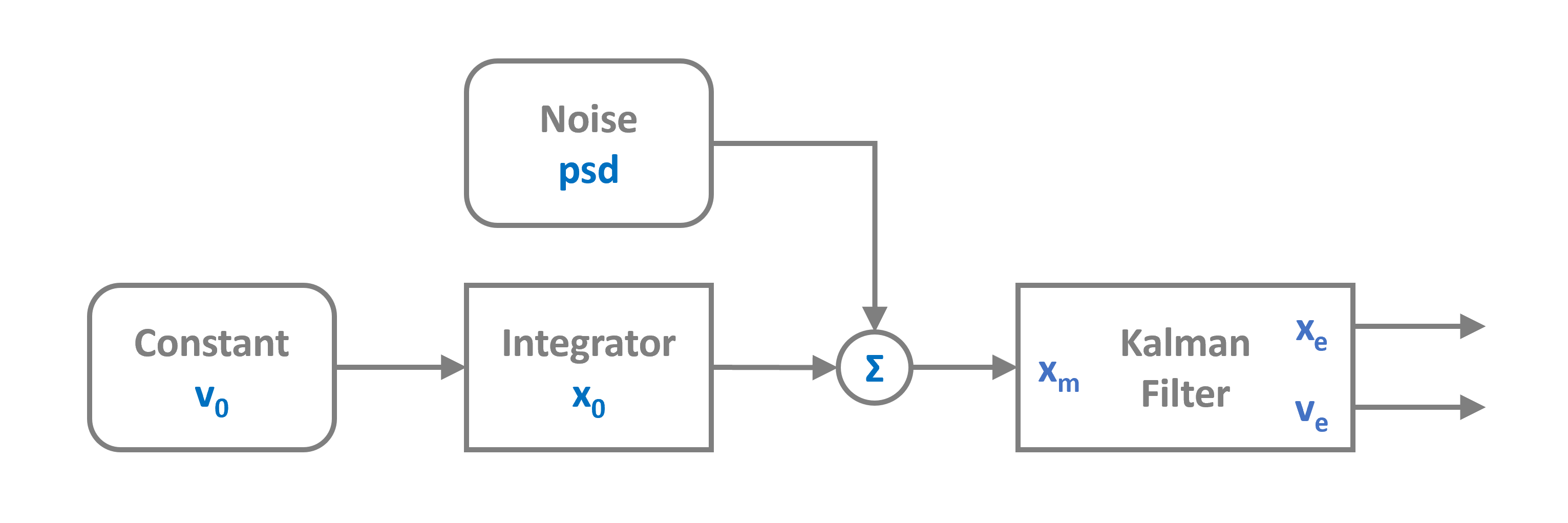
Now we construct the complete system including:
The true system (constant velocity integrator)
Noisy measurement sensor
Kalman filter for state estimation
[4]:
# True system
vel = Constant(v_true)
pos = Integrator(x0_true)
# Noisy measurement (spectral_density must be scaled by dt for discrete-time white noise)
noise = WhiteNoise(spectral_density=measurement_std**2 * dt)
measured_pos = Adder()
# Kalman filter
kf = KalmanFilter(F, H, Q, R, x0=x0_kf, P0=P0_kf)
# Scopes for recording
sc_true = Scope(labels=["true position", "true velocity"])
sc_meas = Scope(labels=["measured position"])
sc_est = Scope(labels=["estimated position", "estimated velocity"])
blocks = [vel, pos, noise, measured_pos, kf, sc_true, sc_meas, sc_est]
The WhiteNoise block adds Gaussian noise to the true position measurement. The KalmanFilter processes these noisy measurements to estimate both position and velocity.
[5]:
# Connections
connections = [
Connection(vel, pos, sc_true[1]),
Connection(pos, measured_pos[0], sc_true[0]),
Connection(noise, measured_pos[1]),
Connection(measured_pos, kf, sc_meas),
Connection(kf[0], sc_est[0]),
Connection(kf[1], sc_est[1])
]
Simulation Setup and Execution¶
[6]:
# Initialize simulation
Sim = Simulation(
blocks,
connections,
dt=dt,
)
# Run the simulation for 20 seconds
Sim.run(duration=20)
11:40:25 - INFO - LOGGING (log: True)
11:40:25 - INFO - BLOCKS (total: 8, dynamic: 1, static: 7, eventful: 0)
11:40:25 - INFO - GRAPH (nodes: 8, edges: 9, alg. depth: 2, loop depth: 0, runtime: 0.042ms)
11:40:25 - INFO - STARTING -> TRANSIENT (Duration: 20.00s)
11:40:25 - INFO - -------------------- 1% | 0.0s<0.2s | 10467.4 it/s
11:40:25 - INFO - ####---------------- 20% | 0.0s<0.1s | 11160.1 it/s
11:40:26 - INFO - ########------------ 40% | 0.1s<0.1s | 11027.6 it/s
11:40:26 - INFO - ############-------- 60% | 0.1s<0.1s | 11414.2 it/s
11:40:26 - INFO - ################---- 80% | 0.1s<0.0s | 11601.0 it/s
11:40:26 - INFO - #################### 100% | 0.2s<--:-- | 11416.4 it/s
11:40:26 - INFO - FINISHED -> TRANSIENT (total steps: 2000, successful: 2000, runtime: 183.78 ms)
[6]:
{'total_steps': 2000,
'successful_steps': 2000,
'runtime_ms': 183.7788279999586}
Results: State Tracking¶
Let’s visualize how well the Kalman filter tracks the true position and velocity:
[7]:
# Read data from scopes
t_true, [pos_true, vel_true] = sc_true.read()
t_meas, [pos_meas] = sc_meas.read()
t_est, [pos_est, vel_est] = sc_est.read()
# Create comparison plots
fig, (ax1, ax2) = plt.subplots(2, 1, figsize=(8, 6), tight_layout=True, dpi=200)
# Position comparison
ax1.set_title('Kalman Filter: Position and Velocity Estimation')
ax1.plot(t_meas, pos_meas, ".", label='Noisy Measurement')
ax1.plot(t_true, pos_true, "-", label='True Position')
ax1.plot(t_est, pos_est, "--", label='Kalman Estimate')
ax1.set_ylabel('Position [m]')
ax1.legend()
# Velocity comparison
ax2.plot(t_true, vel_true, "-", label='True Velocity')
ax2.plot(t_est, vel_est, "--", label='Kalman Estimate')
ax2.set_ylabel('Velocity [m/s]')
ax2.set_xlabel('Time [s]')
ax2.legend()
plt.show()

Estimation Error Analysis¶
Now let’s quantify the estimation accuracy by computing and plotting the absolute errors:
[8]:
# Calculate estimation errors
pos_error = np.abs(pos_est - pos_true)
vel_error = np.abs(vel_est - vel_true)
# Estimation error over time
fig2, (ax3, ax4) = plt.subplots(2, 1, figsize=(8, 6), tight_layout=True, dpi=200)
ax3.plot(t_est, pos_error)
ax3.set_ylabel('Position Error [m]')
ax3.set_title('Kalman Filter Estimation Error')
ax4.plot(t_est, vel_error)
ax4.set_ylabel('Velocity Error [m/s]')
ax4.set_xlabel('Time [s]')
plt.show()
